This module is a plugin for python-can. It adds support for the USBtingo USB to CAN-FD interface.
Install using pip:
$ pip install python-can-usbtingo
After installation, the usbtingo interface can be used like any other in python-can.
Python-can provides a tool for monitoring received frames on the console. Connects to a 125kBaud classic CAN bus:
python -m can.viewer -i usbtingo --bitrate 125000
Connects to a 1M/2M CAN-FD bus. If several USBtingos are connected, -c with the unique USB serial number (here: ABCD1234) selects a specific device:
python -m can.viewer -i usbtingo --fd --bitrate 1000000 --data_bitrate 2000000 -c ABCD1234
import can
with can.Bus(interface="usbtingo", bitrate=125000) as bus:
message = can.Message(arbitration_id=0x123, is_extended_id=False, data=[0x11, 0x22, 0x33, 0x44])
bus.send(message) # blocking: wait until message sent outimport can
with can.Bus(interface="usbtingo", fd=True, bitrate=1000000, data_bitrate=2000000) as bus:
message = can.Message(arbitration_id=0x123, is_fd=True, bitrate_switch=True, data=range(64))
bus.send(message, timeout=0) # non-blockingimport can
with can.Bus(interface="usbtingo", bitrate=125000, channel="ABCD1234") as bus:
message = bus.recv()
print(message)import can
def parse_data(msg):
print(msg)
with can.Bus(interface="usbtingo", is_fd=True, bitrate=1000000, data_bitrate=2000000, receive_own_messages=True) as bus:
can.Notifier(bus, [parse_data])
bus.send(can.Message(arbitration_id=0x123, is_fd=True, bitrate_switch=True, data=range(12)), timeout=0)
while True:
time.sleep(1)import can
with can.Bus(interface="usbtingo", bitrate=125000, state=can.BusState.PASSIVE) as bus:
for msg in bus:
print(f"{msg.arbitration_id:X}: {msg.data}")Note
In listen-only (passive) mode, no ACKs are generated on the CAN bus. With only one active bus device, this causes multiple transmission attempts or errors.
import can
with can.Bus(interface="usbtingo", is_fd=True, bitrate=1000000, data_bitrate=2000000, receive_own_messages=True) as bus:
bus.set_filters([
{"can_id": 0x321, "can_mask": 0x7fe, "extended": False}, # accept standard frame with id 0x321
{"can_id": 0x001, "can_mask": 0x001, "extended": False}, # accept all odd ids of standard frames
{"can_id": 0x1234567, "can_mask": 0x1fffffff, "extended": True}, # accept extended frame with id 0x1234567
{"can_id": 0x0000000, "can_mask": 0x00000001, "extended": True} # accept all even ids of extended frames
])USBtingo generates hardware timestamps by default - both RX and TX. This allows the response time to be measured in an echo test:
import can
import time
with can.Bus(interface="usbtingo", bitrate=10000) as bus:
bus.recording_start()
print("wait for message...")
msgrx = bus.recv()
print(msgrx)
print("received. now send a messaage")
msgtx = can.Message(arbitration_id=0x123, is_extended_id=False,
data=[0x00, 0x11, 0x22, 0x33, 0x44, 0x55, 0x66, 0x77])
bus.send(msgtx)
print(msgtx)
diff = msgtx.timestamp - msgrx.timestamp
print("time diff in milliseconds: ", diff * 1000)
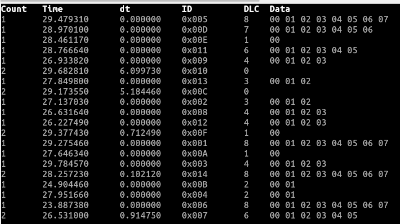
bus.recording_stop()Output:
$ python echotest.py
wait for message...
Timestamp: 1701853126.749139 ID: 0123 S Rx DL: 4 11 22 33 44
received. now send a messaage
Timestamp: 1701853126.759339 ID: 0123 S Tx DL: 8 00 11 22 33 44 55 66 77
time diff in milliseconds: 10.200023651123047
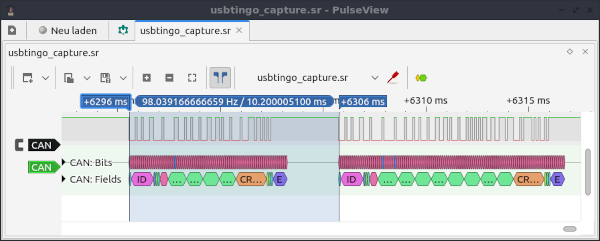
Additionally the recording function for the CAN-RX line was used. The recorded signal (stored to file usbtingo_capture.sr by default) can be be analyzed with Pulseview:
import can
devicelist = can.detect_available_configs(interfaces=["usbtingo"])
print(devicelist)