Bimanual demo within Integrated World #240
Conversation
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
|
Strongly recommend to ensure this fix ros-controls/ros_controllers#577 is available in your local |
|
We did bring up this PR in the meeting and said @crvogt / @j-herman / @mabelzhang can review it, whoever gets to it first. On your mark, get set. |
There was a problem hiding this comment.
A suggestion if we could be consistent with model naming rexrov0, rexrov1, ... would be useful while scaling up.
Leaving the mesh and sdf changes for someone more experienced. Apart from that looks good and the world loads up with rexrov joystick control as expected! Though, getting an eigenpy runtime dependency issue in the dual-arm controller, is anyone else facing the same?
|
Re dependency - I haven't tried it yet, but a quick possibility, we added new dependencies for the bimanual demo recently https://github.com/Field-Robotics-Lab/dockwater/pull/21/files Doesn't look related to EigenPy though. |
My dockwater was up to date but moveit-industrial-planner failing to initialize, other missing dependencies. All set now! |
Agreed. I left it as
I haven't seen that issue before.
I'm not sure if the dependencies in dockwater are upto date but there are a couple of moveit dependencies that were missing and have been patched here #239. If you run a |
|
We should wait for #241 to be merged and include those changes into this branch to utilize the effort controller manager |
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
Signed-off-by: Yadunund <[email protected]>
|
I'm merging this PR given the upcoming code freeze. If anyone discovers any issues, please open a ticket and we can patch in the changes. |
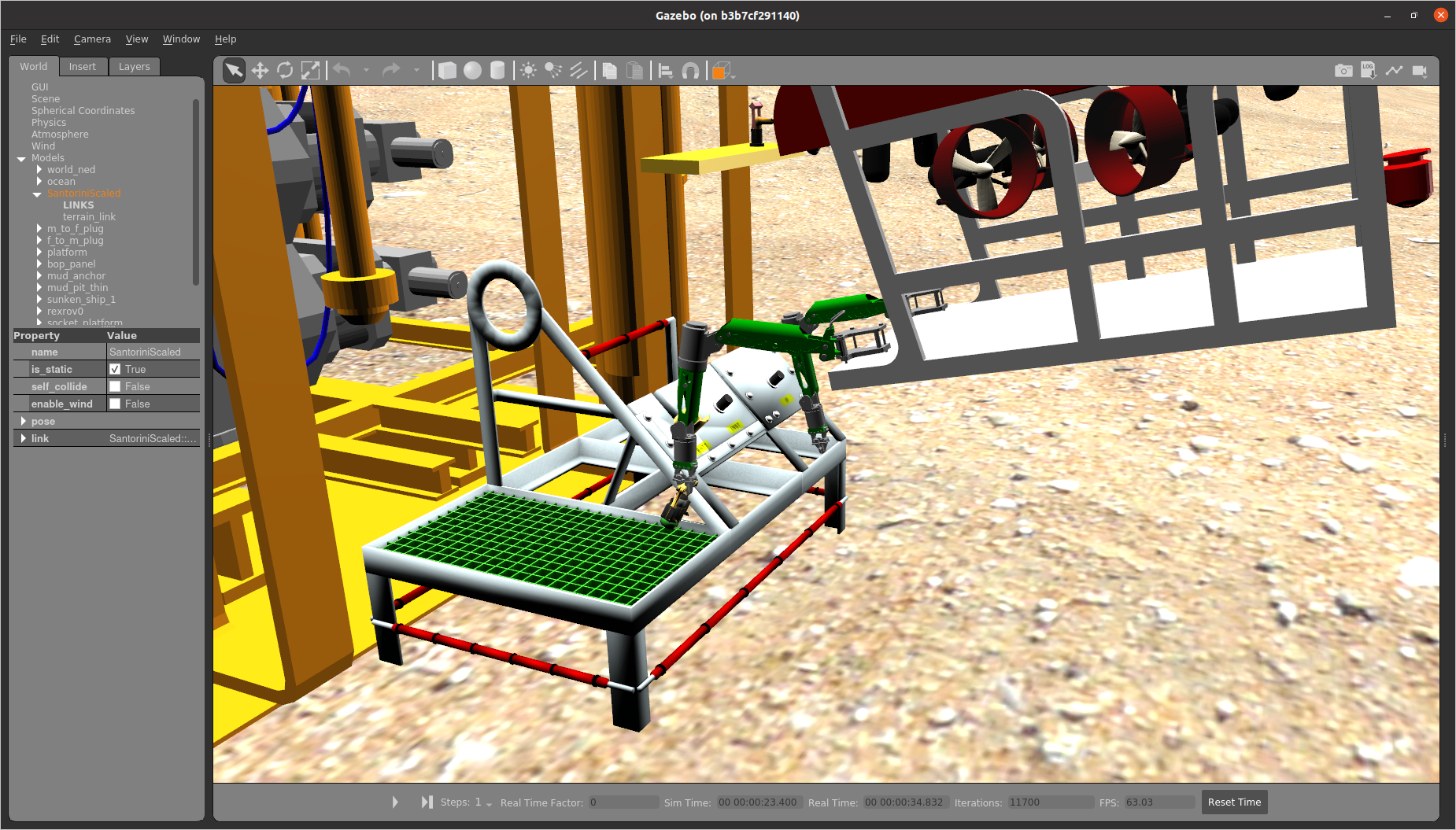
This PR effectively combines the electrical lead and bimanual demonstrations with a dual arm rexrov that grasps and inserts the electrical plug into the socket.
To launch world,
To start moveit
To command arm
The arm will bring the plug fairly close to the socket. The user can teleop the rexrov base (
/dev/input/js1) to the right position and finish off the insertion.bimanual_elec_5x.mp4
Notes:
rexrov0