| 品項 | 數量 | 價錢 | 備註 |
|---|---|---|---|
| MG996R servo motor 90度 | 12 | 195(不含稅) | |
| HC-SR04 Ultrasonic sensor | 2 | 120 | |
| MPU-6050 Gyro sensor or MPU-9050 | 1 | 99 | |
| I2C 16x2 LCD Module | 1 | 129 | |
| Rleil rocker switch RL3-4 | 1 | 20 | |
| 7.4v Battery | 1 | 實驗室有 | |
| Raspberry Pi 3B+ | 1 | 1505 | |
| F625zz Flange ball bearing | 8 | 110 | |
| PCA9685 | 1 | 286 | |
| 5V/5A | 1 | 133 |
| 品項 | 數量 | 價錢 | 備註 |
|---|---|---|---|
| M5×15 | 8 | ||
| M4×20 | 40 | ||
| M4×15 | 8 | ||
| M4 nut | 48 | ||
| M3×20 | 4 | ||
| M3×10 | 28 | ||
| M3 nut | 16 | 螺絲共250 | |
| 三秒膠+砂紙 | 1 | 95 | |
| M3×25 | 8 | ||
| 麵包版+電線 | 1 | 250 | |
| Flexible PLA | 1 | 330 | 顏色可以自己選 |
電子材料行



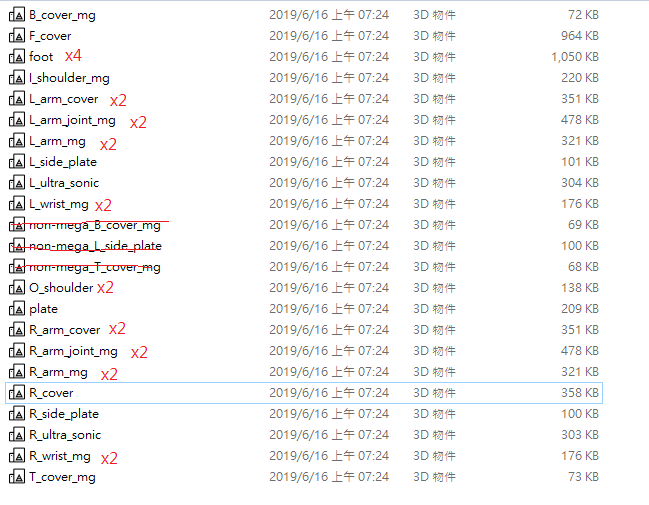
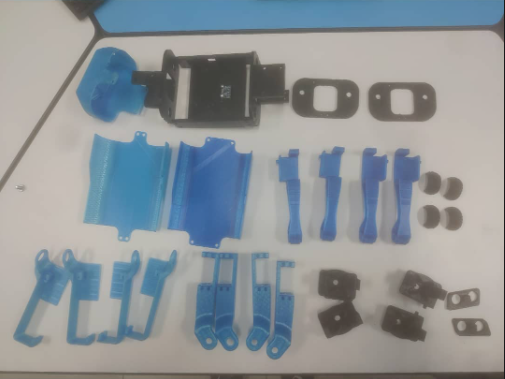
列印前必須將模型切片
cura
再送到3D印表機
因好應如下圖
最後 你必須要有耐心 因為要組10台,在說你小胖(王郁翔),不是你啦酒鬼。
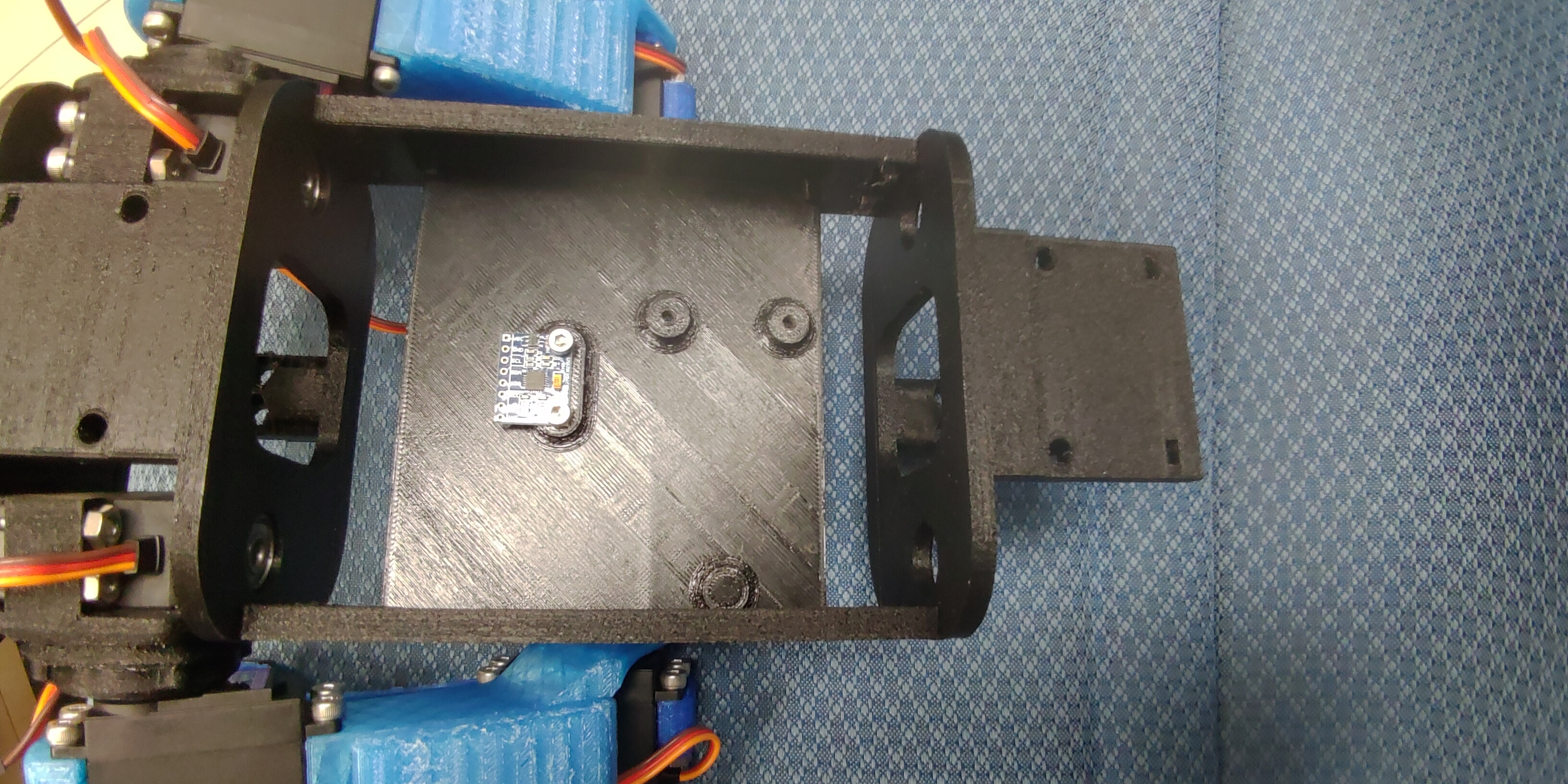
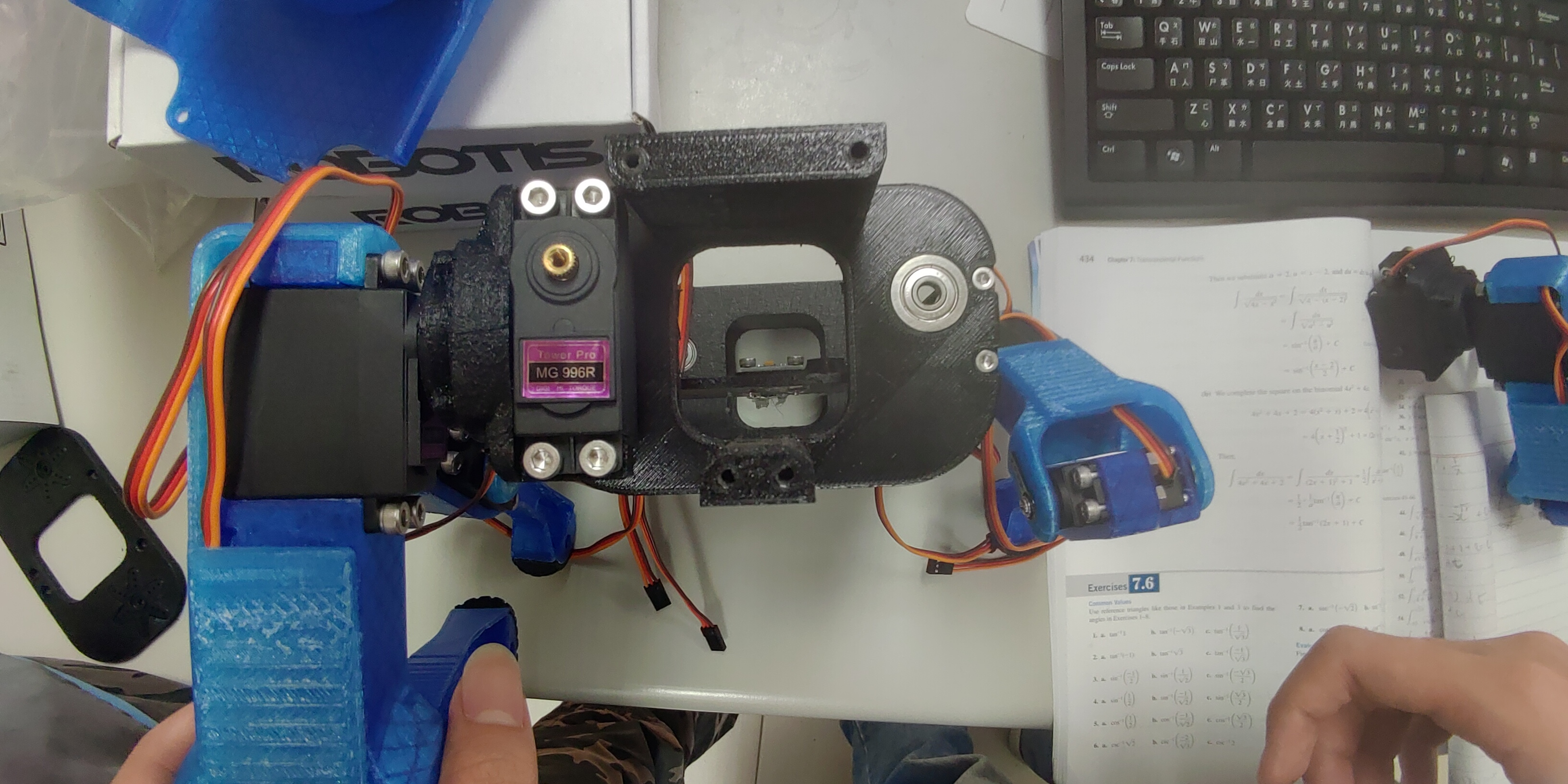
1.先將中心部份組好如圖所示,使用M3螺絲及螺帽

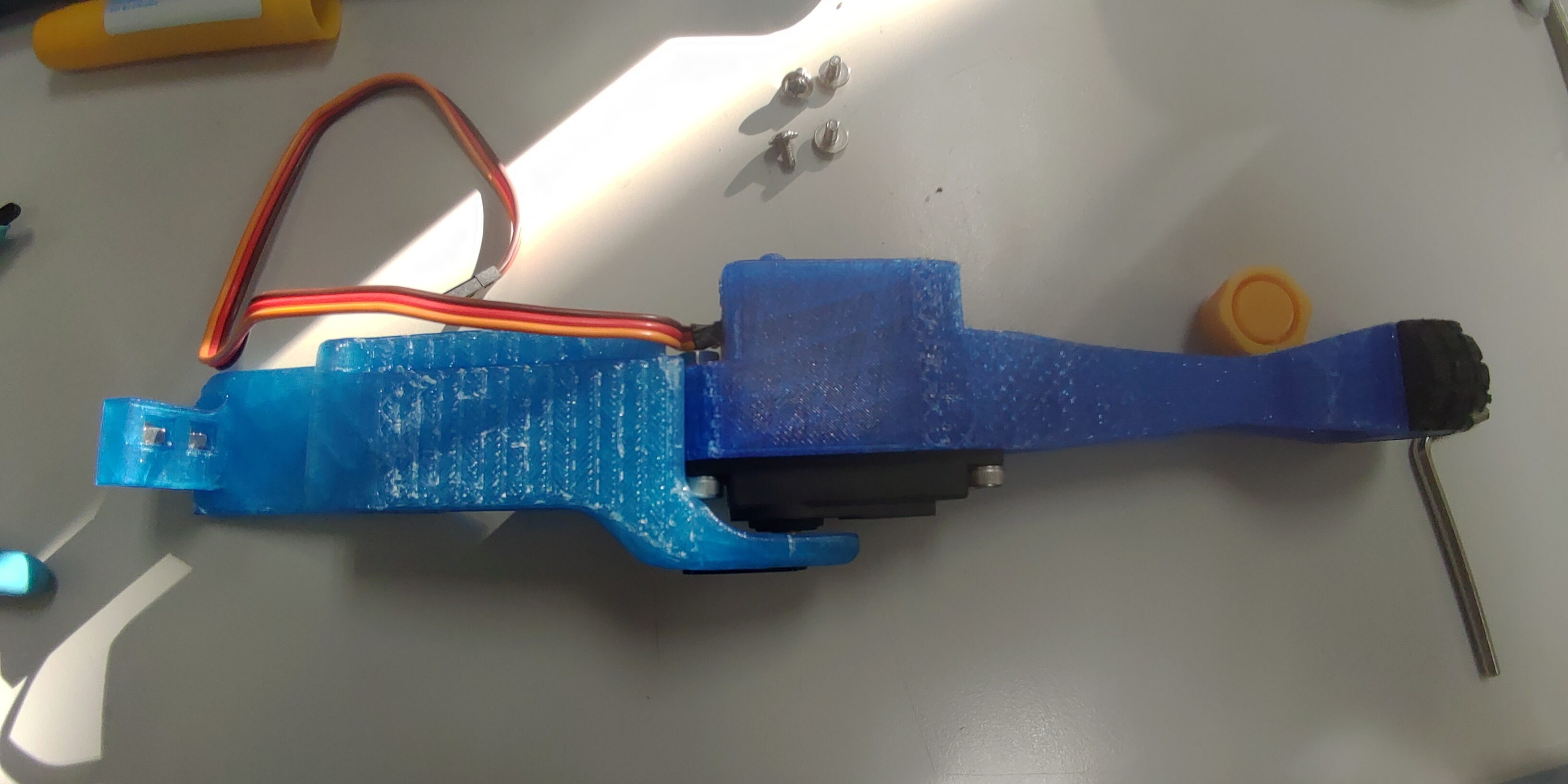
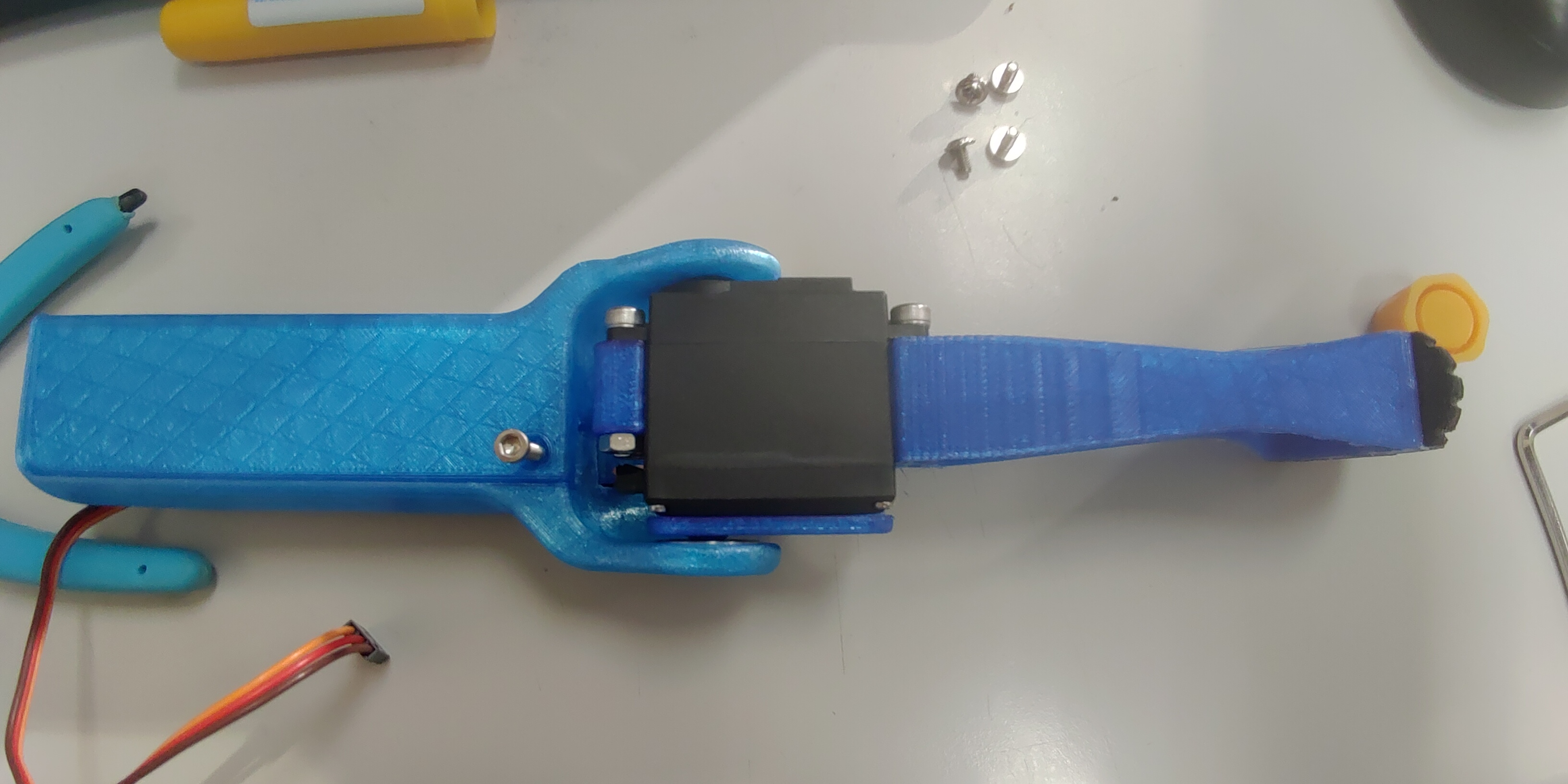
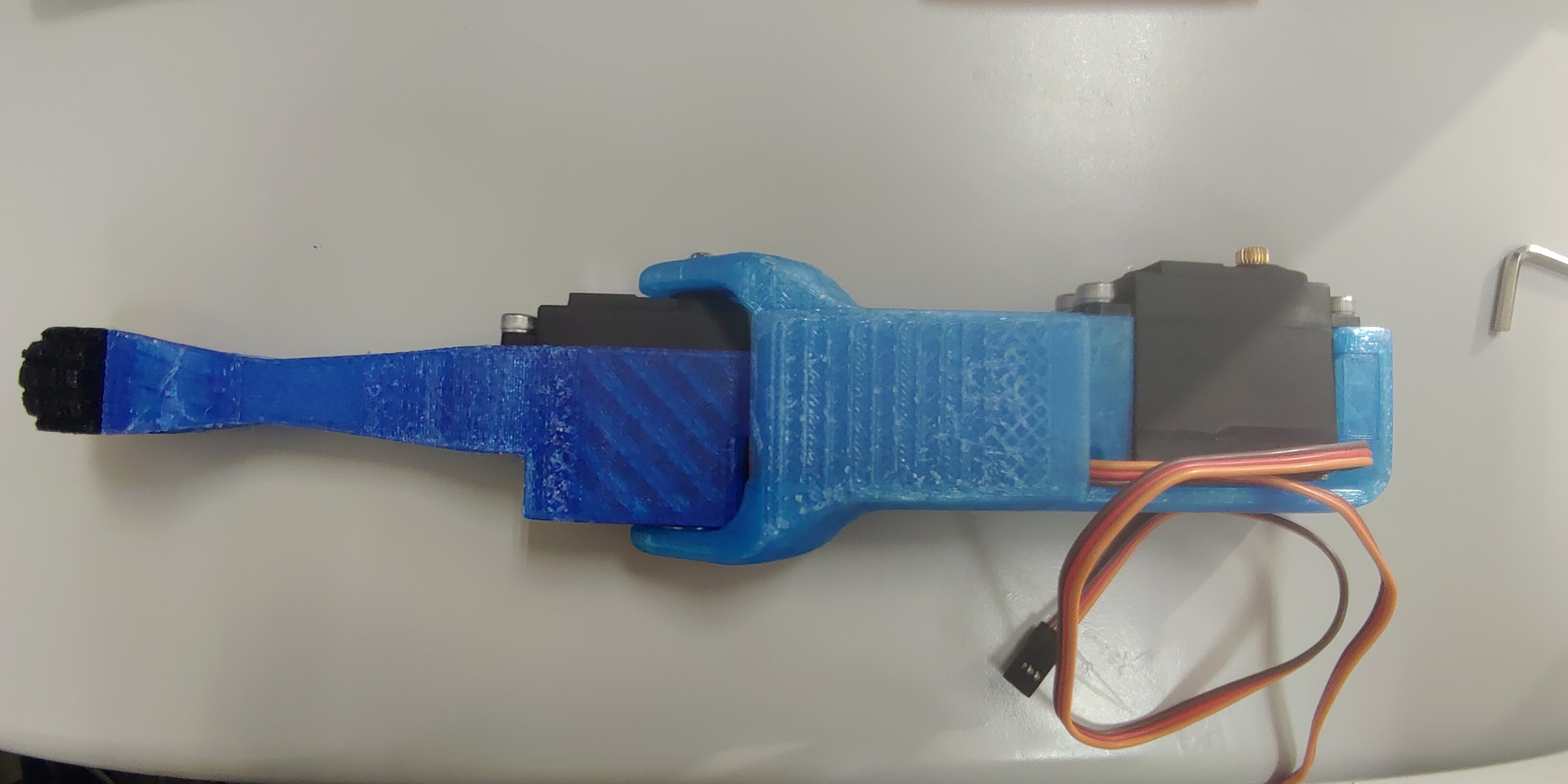
2.腳分為三個部件,小腿、大腿及關節

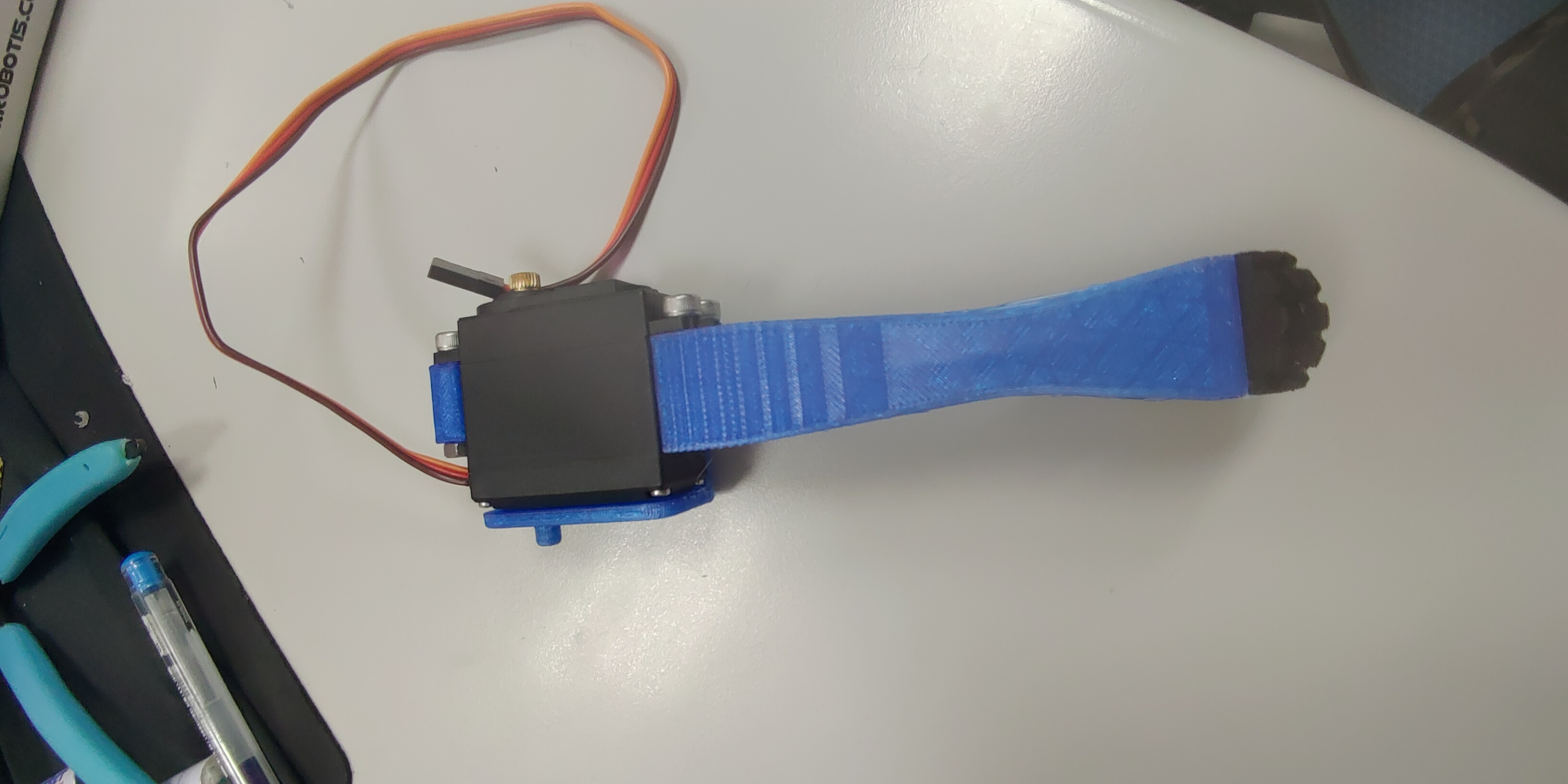

將線埋進凹槽裡


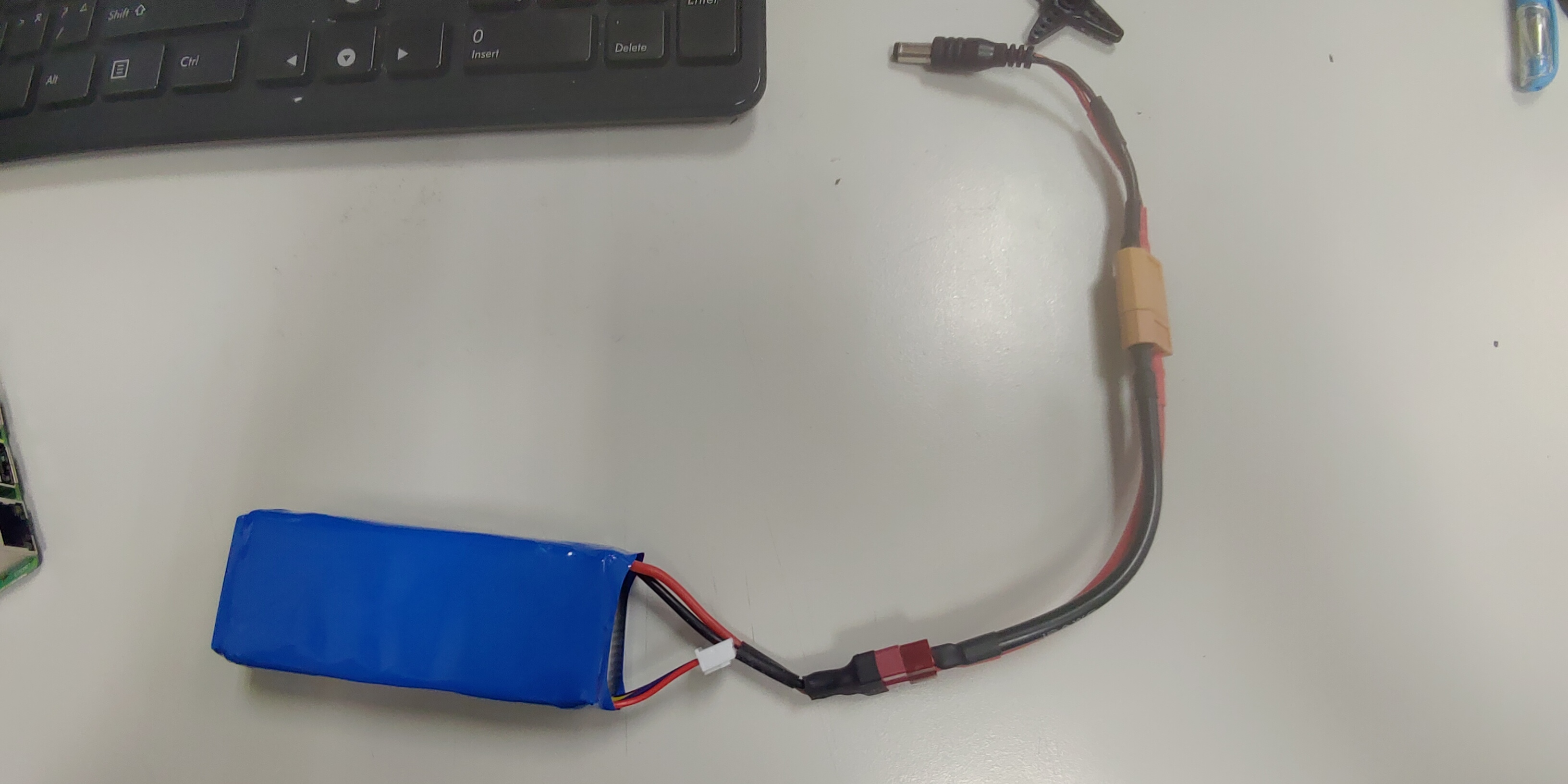
請將電池T接頭與3.5mmDC接頭焊在一起
https://github.com/mike4192/spotMicro 請參考此篇
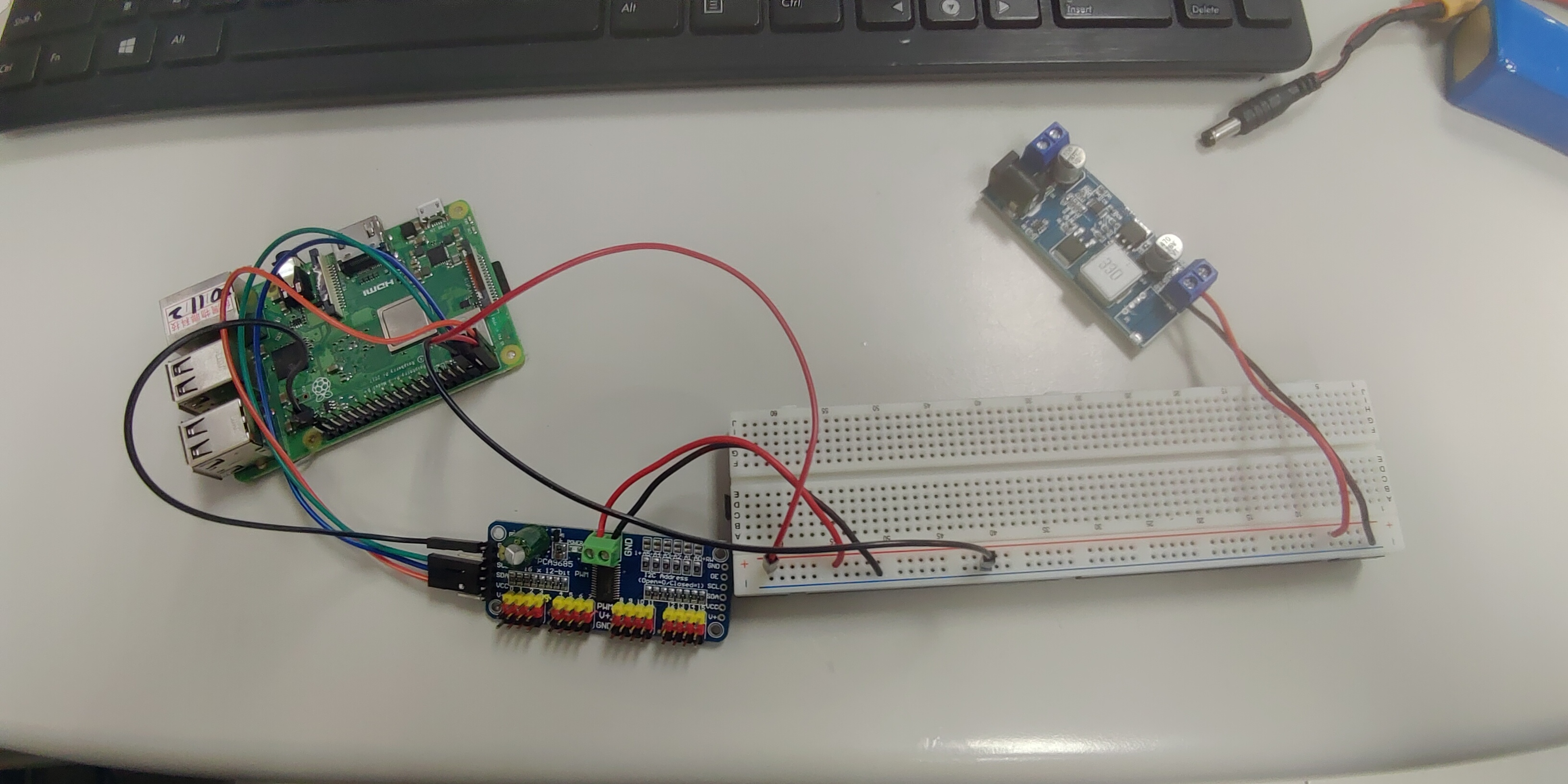
PCA9685在推不動的時候會燒掉,不確定是不是跟降壓模組有關。 馬達接上去的時候要注意方向,可以先確定她得位置之後再鎖上去。
PCA9685 在馬達卡死時會燒掉,可能會稍電容跟IC,寒假完修。 校正不知為什麼沒有設定好,可能要手動調一遍。 電流可能不夠,有點撐不起來。