This project is intended to implement some of environment perception tasks that are often used in Autonomous Vehicles pipelines.
Project consists of the following subsequent tasks:
- Detecting objects with neural network
- Estimating image depth from corresponding pairs of stereo images
- Computing distances to closest obstacles using image depths and bounding boxes
- Estimating vehicle trajectory from subsequent images (independent task)
For object detection as a baseline I use YOLO v3 detector with Darknet backbone. Pretrained imagenet weights were downloaded from https://pjreddie.com/media/files/darknet53.conv.74)
Credits for PyTorch realization come to: https://github.com/packyan/PyTorch-YOLOv3-kitti and https://github.com/keshik6/KITTI-2d-object-detection
Experiments are based on famous road traffic Kitti 2D object detection dataset that consists of 7481 training images and 7518 test images: http://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=2d
Example of image:

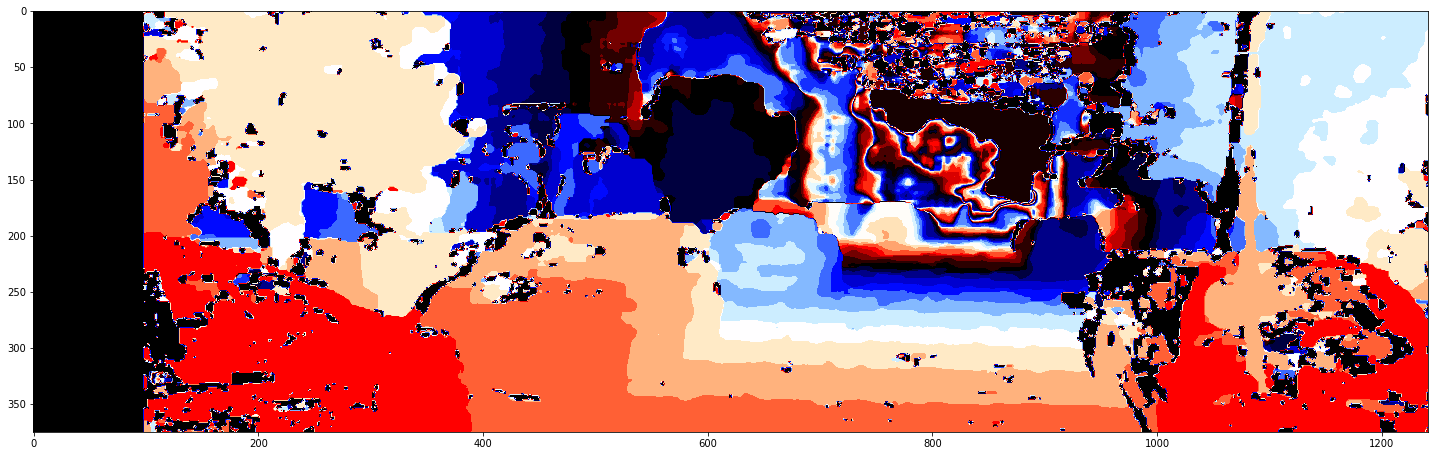
Given a pair of stereo images from both left and right camera it is possible to extract image depth. Intensity of each pixel here corresponds to a distance from camera.
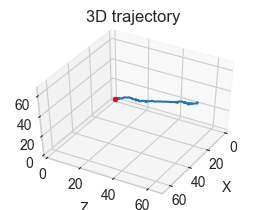
Extract kepoints and feature descriptors, match featches using openCV algirithms to solve visual odometry problems. Example of estimated vehicle trajectory computed on a series of subsequent road images:
In order to run any of these tasks clone the project make sure you are inside the project directory and do the following:
- Create virtual environment:
make venv - Activate venv
source venv/bin/activate - Install project dependencies
pip3 install -r requirements.txt - Run tests to check everything is ok:
make test - Run any task you want. For example to run stereo depth estimation, call the script as folows:
python3 estimate_stereo_depth.py --image_data_path_template path/to/image/pairs --dest_dir path/to/save --num_disparities 16 --block_size 11